UIL at NeuRIPS
Urban Information Lab Members Present Research at NeurIPS 2025 in San Diego
Members of the Urban Information Lab (UIL) recently participated in NeurIPS 2025, held in San Diego, one of the world’s leading conferences on machine learning and artificial intelligence. This year’s conference featured a wide range of cutting-edge research on AI theory, systems, and applications, including growing attention to urban-scale challenges through the UrbanAI: Harnessing Artificial Intelligence for Smart Cities workshop.
UIL members Yiming, Tianyi, and Baik presented their research through poster sessions, showcasing how advanced AI methods—particularly large language models (LLMs) and multi-agent systems—can be applied to urban mobility, infrastructure, and spatial-economic analysis. During the conference, the group also reconnected with UIL alumnus Sean, highlighting the lab’s continuing academic network.
LLM-Powered Digital Twins for Urban Mobility
Yiming presented his work titled
“LLM-Powered Digital Twins for Interactive Urban Mobility Simulation: Integrating SUMO with AI Agents.”
This research introduces a web-based transportation digital twin that integrates the SUMO traffic simulator with LLM-based AI agents using the OpenAI Agents SDK and Model Context Protocol (MCP). The system enables users to interact with complex mobility simulations through natural language, lowering technical barriers for planners and non-experts. Users can conversationally define scenarios such as road network changes, traffic signal retiming, parking policies, or special events, which are translated by AI agents into executable simulation commands. Using Austin, Texas as a case study, the work demonstrates how LLM-augmented digital twins can support policy testing, resilience evaluation, and sustainable mobility planning.
EV Charging Stations and Urban Economic Spillovers
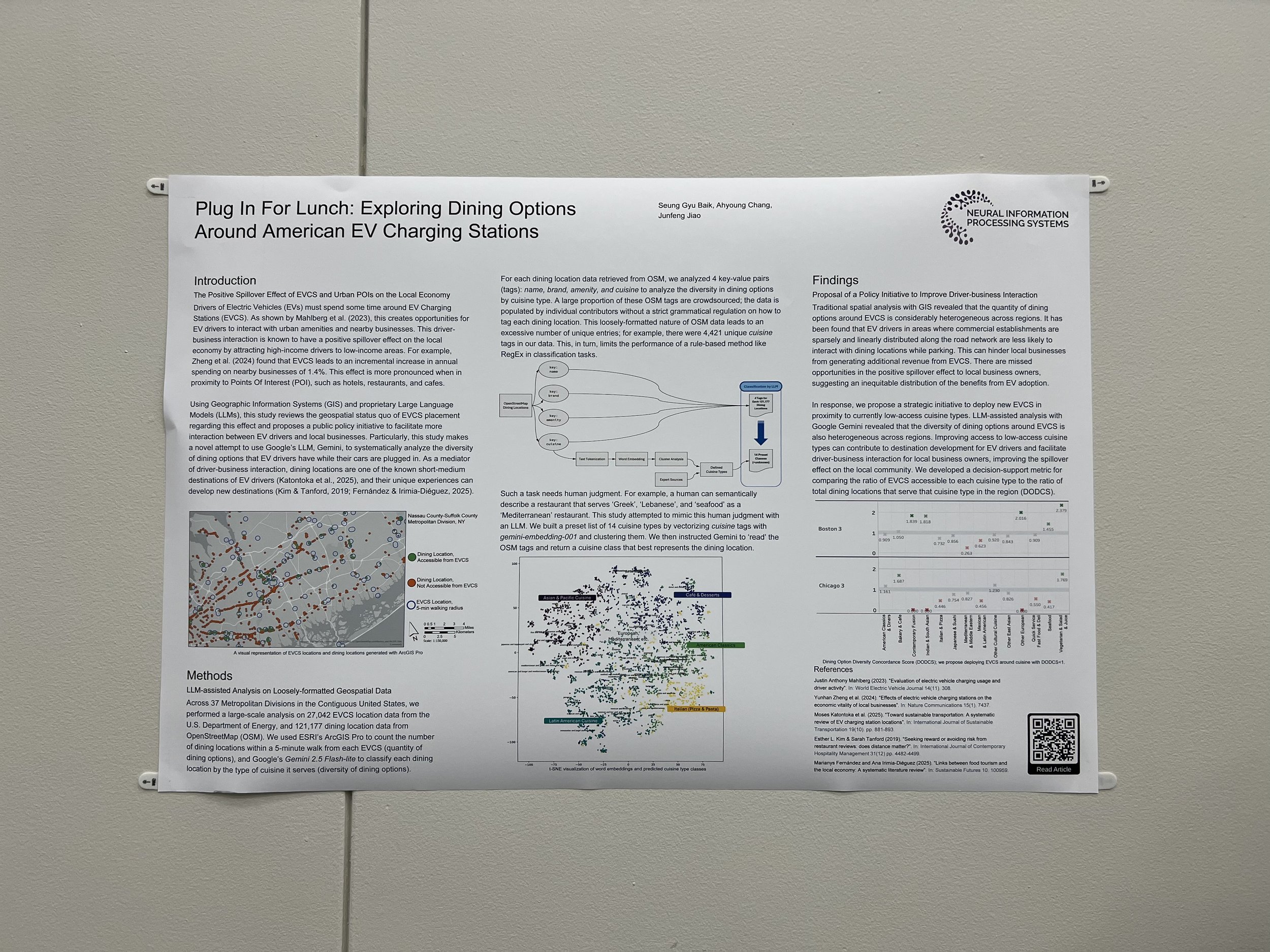
Baik shared a poster titled
“Plug In For Lunch: Exploring Dining Options Around American EV Charging Stations.”
The study applies LLM-assisted analysis to loosely structured geospatial data to examine the relationship between EV charging stations (EVCS) and nearby dining options in the United States. Beyond methodological contributions, the research proposes policy initiatives aimed at maximizing positive spillover effects between EVCS infrastructure and surrounding urban points of interest (POIs), emphasizing the role of charging stations as catalysts for local economic activity.
Multi-Agent Systems and Physics-Informed AI for Urban Applications
Tianyi presented two papers at the UrbanAI workshop:
“Trust-Based Multi-Agent Framework for On-Ramp Merging Integrating Large Language Models”
“Physics-Informed Learning via Diffusion Framework for System State Estimation”
These works explore how LLMs and diffusion-based learning frameworks can be combined with domain knowledge and trust mechanisms to improve decision-making and system estimation in complex, real-world environments, including transportation systems relevant to urban contexts.
Participation in NeurIPS 2025 reflects Urban Information Lab’s continued engagement with the global AI research community and its commitment to advancing human-centered, AI-driven urban systems research. The conference also provided valuable opportunities for collaboration, knowledge exchange, and reconnection with UIL alumni.
Urban Information Lab looks forward to building on these contributions and further exploring how cutting-edge AI methods can inform urban planning, mobility, and infrastructure policy.